mdnsd is a small Multicast DNS and DNS-SD (service discovery) responder and library for advertising and discovering hosts and services on the local link.
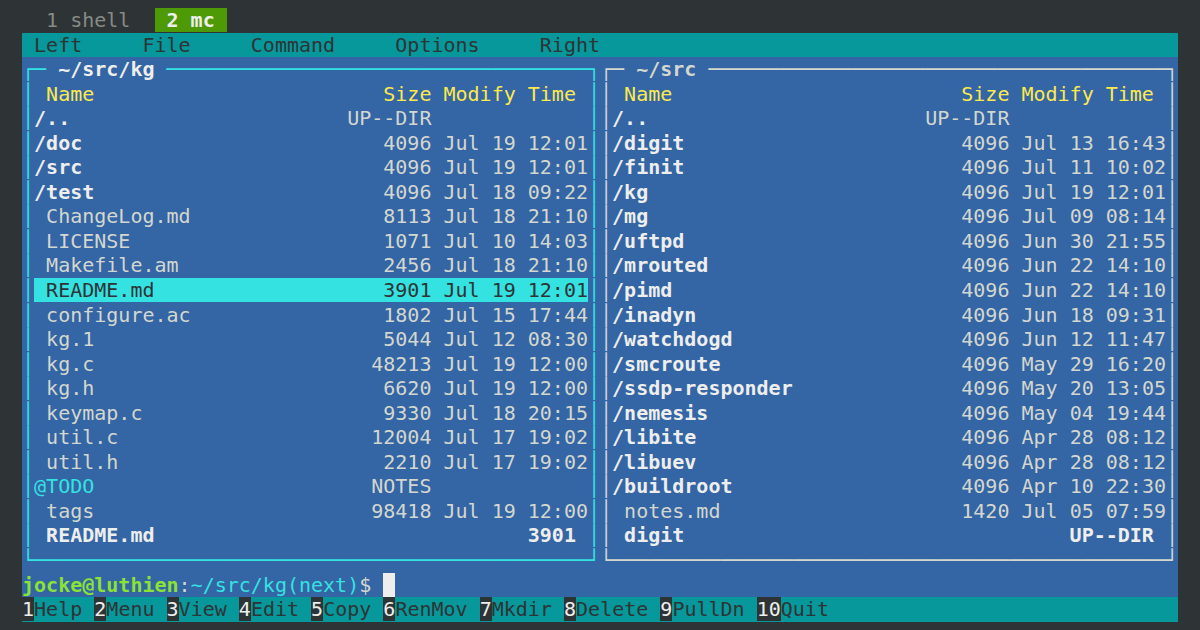
Mockup of rxvt new look, running Midnight Commander.
I want to test the editors I maintain, kg and mg, on as many
terminals as possible, and after bouncing between xterm, GNOME Terminal,
kitty, Alacritty and Terminator over the years, rxvt is the
one I keep coming back to – mostly for how far it bends to a plain
config file. So here’s how I set it up with a few sane defaults, or at
least how far I got …
The following writeup is part of my series; Reminders to self.
Please let me know if there’s anything you’d like me to delve
further into.
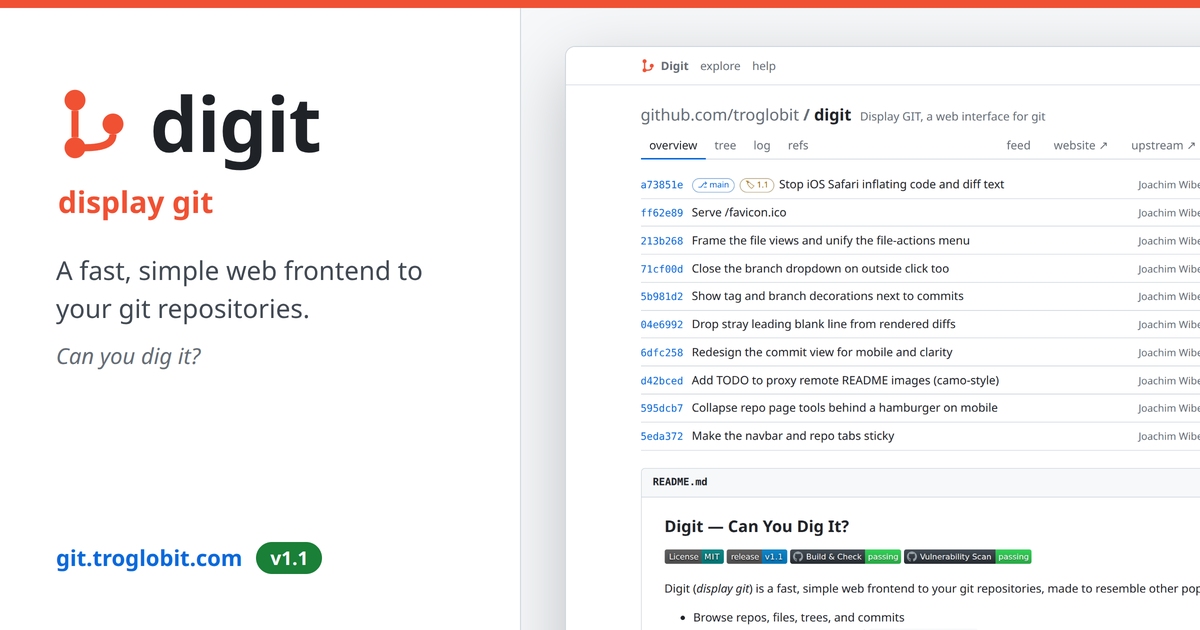
Like many of you I keep mirrors of my projects on a small VPS —
partly as insurance, GitHub is lovely until it isn’t, and partly
because I like having my own corner of the web. For years gitweb
did the honors, showing its age but doing the job. When I went
looking for something nicer I found legit, which looks great —
but on my single-core droplet it pegged the CPU just rendering a
repo page. Add the AI scraper herds that graze on every public git
frontend these days, and the poor machine never had a quiet moment.
Well, this has been quiet for a while. Not because I stopped tinkering
— quite the opposite. Almost all of my time these days goes into Infix
OS, a Linux-based network operating system by Wires. The OS is
maintained under an independent organization, KernelKit, where I blog a
lot — so check out the KernelKit blog.
In my Reminder to Self series, this week we turn to some tricks I learned while porting U-Boot to a new board. First, a few tools:
vbindiff: Linux tool to examine, e.g., flash.bin binwalk: Linux tool to examine an unknown binary file bdinfo: U-Boot command to list board info When poking through such binaries, the FDT (flattened device tree) header magic to look for is 0xd00dfeed.
Huge props to wkz for all the help and sparring, cheers!
Here are a few Buildroot tricks I use to develop and test my packages. This post will likely evolve over the years to come.
For the basics, please see my post Buildroot Development Checklist. It covers how to use the check-package and test-pkg tools shipped with Buildroot.
Tip: if stuck, always check the Buildroot documentation!
introduction I often need to rebuild from scratch to verify fundamental changes to the structure of my embedded systems.
Very brief intro to building GNU Emacs from GIT, with GCC JIT enabled to greatly speed up our favorite editor, GNU Emacs!
Perquisites You need a lot of development packages installed to check out and build Emacs. How to install these are outside the scope of this blog post. The output of the configure script and some intuition is usually sufficient. On Debian, Ubuntu, or Linux Mint, systems at least the following is needed:
Daniel Lipovetsky’s Typometer results.
Ever since I first learned about Terminator I’ve been a huge fan! It’s a great replacement for the standard Gnome terminal with its built-in support for horizontal and vertical splits.
It’s not a race car though … like Gnome terminal it’s built around libvte. So on a bad day of clashing with Ubuntu, GDM, systemd and the new handling of capabilities, two of my colleagues went all-in on Alacritty and now swear by it!
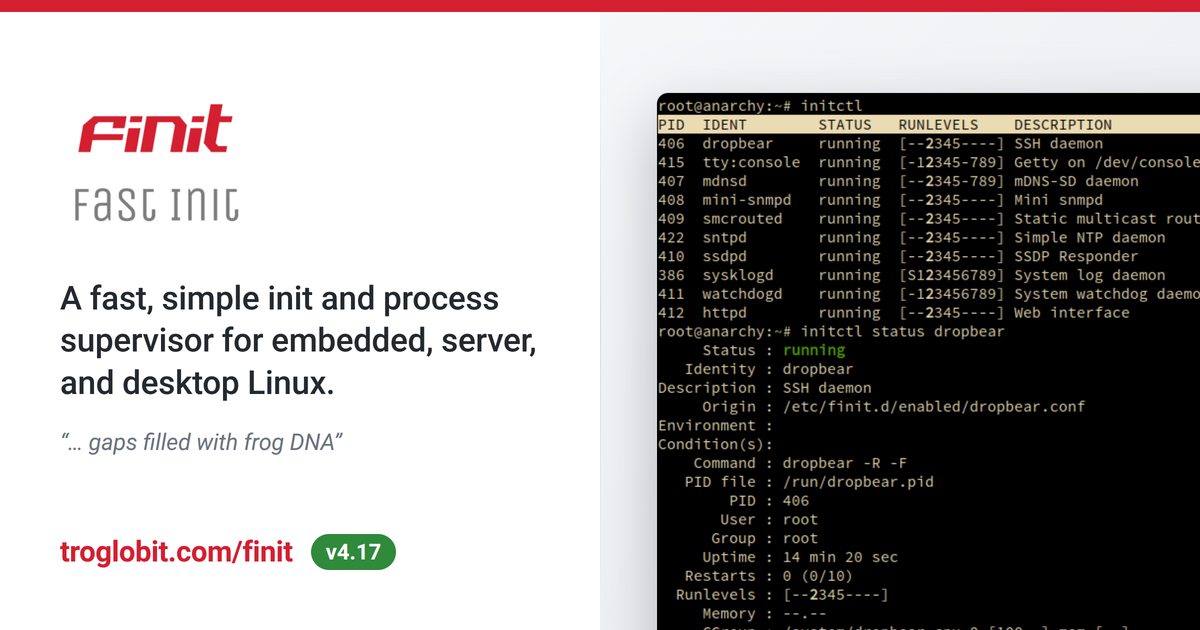
Finit is a fast, simple init and process supervisor for embedded, server, and desktop Linux -- an alternative to SysV init and systemd, reverse engineered from the EeePC fastinit.