Fast init for Linux systems

Finit is an alternative to SysV init and systemd, originally reverse engineered from the EeePC fastinit by Claudio Matsuoka — “gaps filled with frog DNA …”
Latest release available on GitHub
Features
- Runlevels, defined per service
- One-shot tasks, services (daemons), or SysV init start/stop scripts
- Runparts and
/etc/rc.localsupport - Process supervision similar to systemd
- Sourcing environment files
- Conditions for network/process/custom dependencies
- Pre/Post script actions
- Tooling to enable/disable services
- Optional built-in getty
- Optional built-in watchdog, with support for hand-over to watchdogd
- Built-in support for Debian/BusyBox
/etc/network/interfaces, automatically calls ifup/ifdown - Cgroups v2, both configuration and monitoring in
initctl top - Plugin support for customization
- Proper rescue mode with bundled
suloginfor protected maintenance shell (optional)
Blog Posts
Some of these feature are presented below, for more, see the online documentation and the following blog posts:
- Finit v4.2 – Try before you buy!
- Dependency handling in Finit
- It’s here! ♥ – Finit v4 release post
- Alpine Linux with Finit
- Buildroot demo of FastInit (Finit)
Example
The GitHub finit/contrib/ section, also part of the release tarball, include sample configurations for Debian, Void, and Alpine Linux.
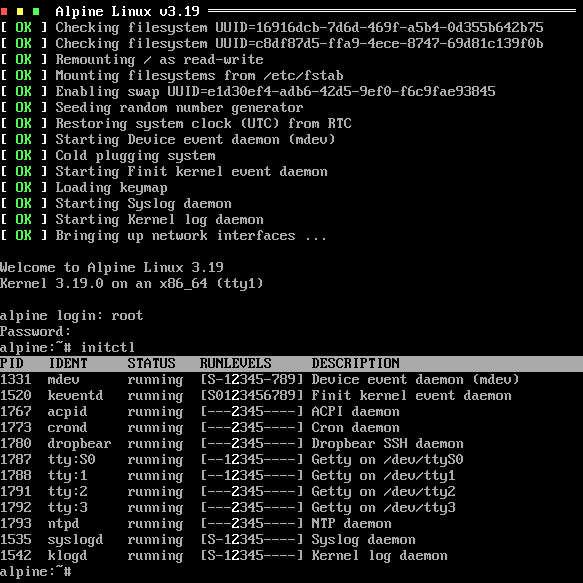
Alpine Linux v3.19 with Finit v4.7
The following Buildroot derivatives provide examples of how to boot embedded systems with Finit:
There’s even a br2-external demo available, with a downloadable image, which may be more accessible to beginners.
Configuration
This example /etc/finit.conf is for Alpine Linux. The release tarball
contains the recommended (and fairly up to date) “split layout” in the
contrib/alpine section. A split layout is where each
service, or set of related services, are defined in their own foo.conf
file in the /etc/finit.d directory. Available, but not yet enabled,
services can be placed in /etc/finit.d/available and enabled by an
operator using the initctl tool.
# Runlevel to start after bootstrap, 'S', default: 2
runlevel 2
# Max file size for each log file: 100 kiB, rotate max 4 copies:
# log => log.1 => log.2.gz => log.3.gz => log.4.gz
log size=100k count=4
# Services to be monitored and respawned as needed
service [S12345] watchdogd -L -f -- System watchdog daemon
service [S12345] syslogd -n -b 3 -D -- System log daemon
service [S12345] <pid/syslogd> klogd -n -- Kernel log daemon
service [2345] env:-/etc/conf.d/lldpd lldpd -d $LLDPD_OPTS -- LLDP daemon (IEEE 802.1ab)
# The BusyBox ntpd does not use syslog when running in the foreground
# So we use this trick to redirect stdout/stderr to a log file. The
# log file is rotated with the above settings. The condition declares
# a dependency on a system default route (gateway) to be set. A single
# <!> at the beginning means ntpd does not respect SIGHUP for restart.
service [2345] log:/var/log/ntpd.log <!net/route/default> ntpd -n -l -I eth0 -- NTP daemon
# For multiple instances of the same service, add :ID somewhere between
# the service/run/task keyword and the command.
service :80 [2345] merecat -n -p 80 /var/www -- Web server
service :8080 [2345] merecat -n -p 8080 /var/www -- Old web server
# Alternative method instead of below runparts, can also use /etc/rc.local
#task [S] /etc/init.d/keyboard-setup start -- Setting up preliminary keymap
#task [S] /etc/init.d/acpid start -- Starting ACPI Daemon
#task [S] /etc/init.d/kbd start -- Preparing console
# When Finit receive SIGPWR, e.g., from powstatd(8), it asserts the
# sys/pwr/fail condition. The <!> in the condition tells Finit to
# not block bootstrap waiting for the task to run.
task [S0123456789] <!sys/pwr/fail> name:pwrfail initctl poweroff -- Power failure, shutting down
# Run start scripts from this directory
# runparts /etc/start.d
# Virtual consoles run BusyBox getty, keep kernel default speed
tty [12345] /sbin/getty -L 0 /dev/tty1 linux
tty [12345] /sbin/getty -L 0 /dev/tty2 linux
tty [12345] /sbin/getty -L 0 /dev/tty3 linux
# Use built-in getty for serial port and USB serial
tty [12345] /dev/ttyAMA0 noclear nowait
tty [12345] /dev/ttyUSB0 noclear
# Just give me a shell, I need to debug this embedded system!
#tty [12345] @console noclear nologin
#tty [12345] notty
#tty [12345] rescue
The service stanza, as well as task, run and others are described
in full in doc/config.md. Here’s a quick overview of some of the
most common components needed to start a UNIX daemon:
service [LVLS] <COND> log env:[-]/etc/default/daemon daemon ARGS -- Daemon daemon
^ ^ ^ ^ ^ ^ ^ ^
| | | | | | | `-- Optional description
| | | | | | `----------- Daemon arguments
| | | | | `-------------------------- Path to daemon
| | | | `---------------------------------------------------- Optional env. file
| | | `-------------------------------------------------------- Redirect output to log
| | `--------------------------------------------------------------- Optional conditions
| `---------------------------------------------------------------------- Optional Runlevels
`------------------------------------------------------------------------------ Monitored application
Some components are optional: runlevel(s), condition(s) and description, making it easy to create simple start scripts and still possible for more advanced uses as well:
service /usr/sbin/sshd -D
Dependencies are handled using conditions. One of the most common conditions is to wait for basic networking to become available:
service <net/route/default> nginx -- High performace HTTP server
Here is another example where we instruct Finit to not start BusyBox
ntpd until syslogd has started properly. Finit waits for syslogd
to create its PID file, by default /var/run/syslogd.pid.
service [2345] log <!pid/syslogd> ntpd -n -N -p pool.ntp.org
service [S12345] syslogd -n -- Syslog daemon
Notice the log keyword, BusyBox ntpd uses stderr for logging when
run in the foreground. With log Finit redirects stdout + stderr
to the system log daemon using the command line logger(1) tool.
A service, or task, can have multiple dependencies listed. Here we wait
for both syslogd to have started and basic networking to be up:
service [2345] log <pid/syslogd,net/route/default> ntpd -n -N -p pool.ntp.org
If either condition fails, e.g. loss of networking, ntpd is stopped
and as soon as it comes back up again ntpd is restarted automatically.
Note: Make sure daemons do not fork and detach themselves from the
controlling TTY, usually an -n or -f flag, or -D as in the case
of OpenSSH above. If it detaches itself, Finit cannot monitor it and
will instead try to restart it.
Features
Process Supervision
Start, monitor and restart services should they fail.
Getty
Finit supports external getty but also comes with a limited built-in
Getty, useful for really small systems. A getty sets up the TTY and
waits for user input before handing over to /bin/login, which is
responsible for handling the actual authentication.
tty [12345] /dev/tty1 nowait linux
tty [12345] /dev/ttyAMA0 noclear vt100
tty [12345] /sbin/getty -L /dev/ttyAMA0 vt100
Users of embedded systems may want to enable automatic serial console
with the special @console device. This works regardless weather the
system uses ttyS0, ttyAMA0, ttyMXC0, or anything else. Finit
figures it out by querying sysfs: /sys/class/tty/console/active.
tty [12345] @console linux noclear
Notice the optional noclear, nowait, and nologin flags. The
latter is for skipping the login process entirely. For more information,
see doc/config.md.
Runlevels
Support for SysV init-style runlevels is available, in the same
minimal style as everything else in Finit. The [2345] syntax can be
applied to service, task, run, and TTY stanzas.
Reserved runlevels are 0 and 6, halt and reboot, respectively just like
SysV init. Runlevel 1 can be configured freely, but is recommended to
be kept as the system single-user runlevel since Finit will not start
networking here. The configured runlevel NUM from /etc/finit.conf
is what Finit changes to after bootstrap, unless ‘single’ (or ‘S’) is
given on the kernel cmdline, in which case runlevel 1 is started.
All services in runlevel S(0) are started first, followed by the desired
run-time runlevel. Run tasks in runlevel S can be started in sequence
by using run [S] cmd. Changing runlevels at runtime is done like any
other init, e.g. init 4, but also using the more advanced
intictl tool.
Plugins
Plugins can extend the functionality of Finit and hook into the
different stages of the boot process and at runtime. Plugins are
written in C and compiled into a dynamic library loaded automatically by
finit at boot. A basic set of plugins are bundled in the plugins/
directory.
Capabilities:
- Hooks
Hook into the boot at predefined points to extend Finit - I/O
Listen to external events and control Finit behavior/services
Extensions and functionality not purely related to what an /sbin/init
needs to start a system are available as a set of plugins that either
hook into the boot process or respond to various I/O.
For more information, see doc/plugins.md.
Automatic Reload
By default, Finit monitors /etc/finit.d/ and /etc/finit.d/enabled/
registering any changes to .conf files. To activate a change the user
must call initctl reload, which reloads all modified files, stops any
removed services, starts new ones, and restarts any modified ones, with
SIGHUP if the process supports it.
For some use-cases the extra step of calling initctl reload creates an
unnecessary overhead, which can be removed at build-time using:
configure --enable-auto-reload
Runparts & /etc/rc.local
At the end of the boot, when all bootstrap (S) tasks and services have
started, but not networking, Finit calls its built-in [run-parts(8)][]
command on any configured runparts <DIR> directory. This happens just
before changing to the configured runlevel (default 2). (Networking is
enabled just prior to changing from single user mode.)
runparts /etc/rc.d/
Right after the runlevel change when all services have started properly,
/etc/rc.local is called.
No configuration stanza in /etc/finit.conf is required for rc.local.
If it exists and is an executable shell script Finit calls it at the very
end of the boot, before calling the HOOK_SYSTEM_UP. See more on hooks
in doc/plugins.md, and about the system bootstrap
in doc/bootstrap.md.
Runlevels
Basic support for runlevels is included in Finit from v1.8. By
default all services, tasks, run commands and TTYs listed without a set
of runlevels get a default set [234] assigned. The default runlevel
after boot is 2.
Finit supports runlevels 0-9, and S, with 0 reserved for halt, 6 reboot and S for services to only run at bootstrap. Runlevel 1 is the single user level, where usually no networking is enabled. In Finit this is more of a policy for the user to define. Normally only runlevels 1-6 are used, and even more commonly, only the default runlevel is used.
To specify an allowed set of runlevels for a service, run command,
task, or tty, add [NNN] to your /etc/finit.conf, like this:
service [S12345] syslogd -n -x -- System log daemon
run [S] /etc/init.d/acpid start -- Starting ACPI Daemon
task [S] /etc/init.d/kbd start -- Preparing console
service [S12345] <pid/syslogd> klogd -n -x -- Kernel log daemon
tty [12345] /dev/tty1
tty [2] /dev/tty2
tty [2] /dev/tty3
tty [2] /dev/tty4
tty [2] /dev/tty5
tty [2] /dev/tty6
In this example syslogd is first started, in parallel, and then acpid is called using a conventional SysV init script. It is called with the run command, meaning the following task command to start the kbd script is not called until the acpid init script has fully completed. Then the keyboard setup script is called in parallel with klogd as a monitored service.
Again, tasks and services are started in parallel, while run commands are called in the order listed and subsequent commands are not started until a run command has completed. Also, task and run commands are run in a shell, so pipes and redirects can be used.
The following examples illustrate this. Bootstrap task and run commands
are also removed when they have completed, initctl show will not list
them.
task [S] echo "foo" | cat >/tmp/bar
run [S] echo "$HOME" >/tmp/secret
Switching between runlevels can be done by calling init with a single
argument, e.g. init 5, or using initctl runlevel 5, both
switch to runlevel 5. When changing runlevels Finit also automatically
reloads all .conf files in the /etc/finit.d/ directory. So if you
want to set a new system config, switch to runlevel 1, change all config
files in the system, and touch all .conf files in /etc/finit.d
before switching back to the previous runlevel again — that way Finit
can both stop old services and start any new ones for you, without
rebooting the system.
Rebooting & Halting
Traditionally, rebooting and halting a UNIX system is done by changing
its runlevel. Finit comes with its own tooling providing: shutdown,
reboot, poweroff, and suspend, but also the initctl tool,
detailed in the next section.
For compatibility reasons Finit listens to the same set of signals as BusyBox init. This is not 100% compatible with SysV init, but clearly the more common combination for Finit. For more details, see doc/signals.md.
Commands & Status
Finit also implements a modern API to query status, and start/stop
services, called initctl. Unlike telinit the initctl tool does
not return until the given command has fully completed.
alpine:~# initctl help
Usage: initctl [OPTIONS] [COMMAND]
Options:
-b, --batch Batch mode, no screen size probing
-c, --create Create missing paths (and files) as needed
-f, --force Ignore missing files and arguments, never prompt
-1, --once Only one lap in commands like 'top'
-p, --plain Use plain table headings, no ctrl chars
-q, --quiet Silent, only return status of command
-t, --no-heading Skip table headings
-v, --verbose Verbose output
-h, --help This help text
Commands:
debug Toggle Finit (daemon) debug
help This help text
version Show Finit version
ls | list List all .conf in /etc/finit.d
create <CONF> Create .conf in /etc/finit.d/available
delete <CONF> Delete .conf in /etc/finit.d/available
show <CONF> Show .conf in /etc/finit.d/available
edit <CONF> Edit .conf in /etc/finit.d/available
touch <CONF> Change .conf in /etc/finit.d/available
enable <CONF> Enable .conf in /etc/finit.d/available
disable <CONF> Disable .conf in /etc/finit.d/enabled
reload Reload *.conf in /etc/finit.d (activate changes)
cond set <COND> Set (assert) user-defined condition +usr/COND
cond clear <COND> Clear (deassert) user-defined condition -usr/COND
cond status Show condition status, default cond command
cond dump Dump all conditions and their status
log [NAME] Show ten last Finit, or NAME, messages from syslog
start <NAME>[:ID] Start service by name, with optional ID
stop <NAME>[:ID] Stop/Pause a running service by name
reload <NAME>[:ID] Reload service by name (SIGHUP or restart)
restart <NAME>[:ID] Restart (stop/start) service by name
status <NAME>[:ID] Show service status, by name
status Show status of services, default command
cgroup List cgroup config overview
ps List processes based on cgroups
top Show top-like listing based on cgroups
runlevel [0-9] Show or set runlevel: 0 halt, 6 reboot
reboot Reboot system
halt Halt system
poweroff Halt and power off system
suspend Suspend system
For services not supporting SIGHUP the <!> notation in the .conf
file must be used to tell Finit to stop and start it on reload and
runlevel changes. If <> holds more conditions, these will
also affect how a service is maintained.
Note: even though it is possible to start services not belonging in the current runlevel these services will not be respawned automatically by Finit if they exit (crash). Hence, if the runlevel is 2, the below Dropbear SSH service will not be restarted if it is killed or exits.
alpine:~# initctl
PID IDENT STATUS RUNLEVELS DESCRIPTION
======================================================================
1506 acpid running [--2345----] ACPI daemon
1509 crond running [--2345----] Cron daemon
1489 dropbear running [--2345----] Dropbear SSH daemon
1511 klogd running [S12345----] Kernel log daemon
1512 ntpd running [--2345----] NTP daemon
1473 syslogd running [S12345----] Syslog daemon
alpine:~# initctl -v
PID IDENT STATUS RUNLEVELS COMMAND
======================================================================
1506 acpid running [--2345----] acpid -f
1509 crond running [--2345----] crond -f -S $CRON_OPTS
1489 dropbear running [--2345----] dropbear -R -F $DROPBEAR_OPTS
1511 klogd running [S12345----] klogd -n $KLOGD_OPTS
1512 ntpd running [--2345----] ntpd -n $NTPD_OPTS
1473 syslogd running [S12345----] syslogd -n
The environment variables to each of the services above are read from,
in the case of Alpine Linux, /etc/conf.d/. Other distributions may
have other directories, e.g., Debian use /etc/default/.
Requirements
Finit is capable of running on both desktop/server systems with udev and
embedded systems that usually come with BusyBox mdev. Some systems have
systemd-udev or eudev today instead of the original udev, Finit probes
for all of them at runtime and expects /dev/ to be a writable file
system using devtmpfs. It is also possible to run on a statically set
up /dev if needed. It is however not a good idea to have both udev
and mdev installed at the same time, this will lead to unpredictable
results.
At boot Finit calls either mdev or udevd to populate /dev, this is
done slightly differently and on systems with udev you might want to add
the following one-shot task early in your /etc/finit.conf:
run [S] udevadm settle --timeout=120 -- Waiting for udev
Finit has a built-in Getty for TTYs, but requires a working /bin/login
or /bin/sh, if no TTYs are configured in /etc/finit.conf.
For a fully operational system /var, /run and /tmp must be set up
properly in /etc/fstab – which is iterated over at boot.
Origin
This project is the continuation of the original finit by Claudio Matsuoka, which was reverse engineered from syscalls of the EeePC fastinit daemon.
Please file bug reports, clone it, or send pull requests for bug fixes and proposed extensions using GitHub: